How to Use an Ultrasonic Sensor with RPi and C++
Follow this wiring diagram for the HC-SR04 ultrasonic sensor: 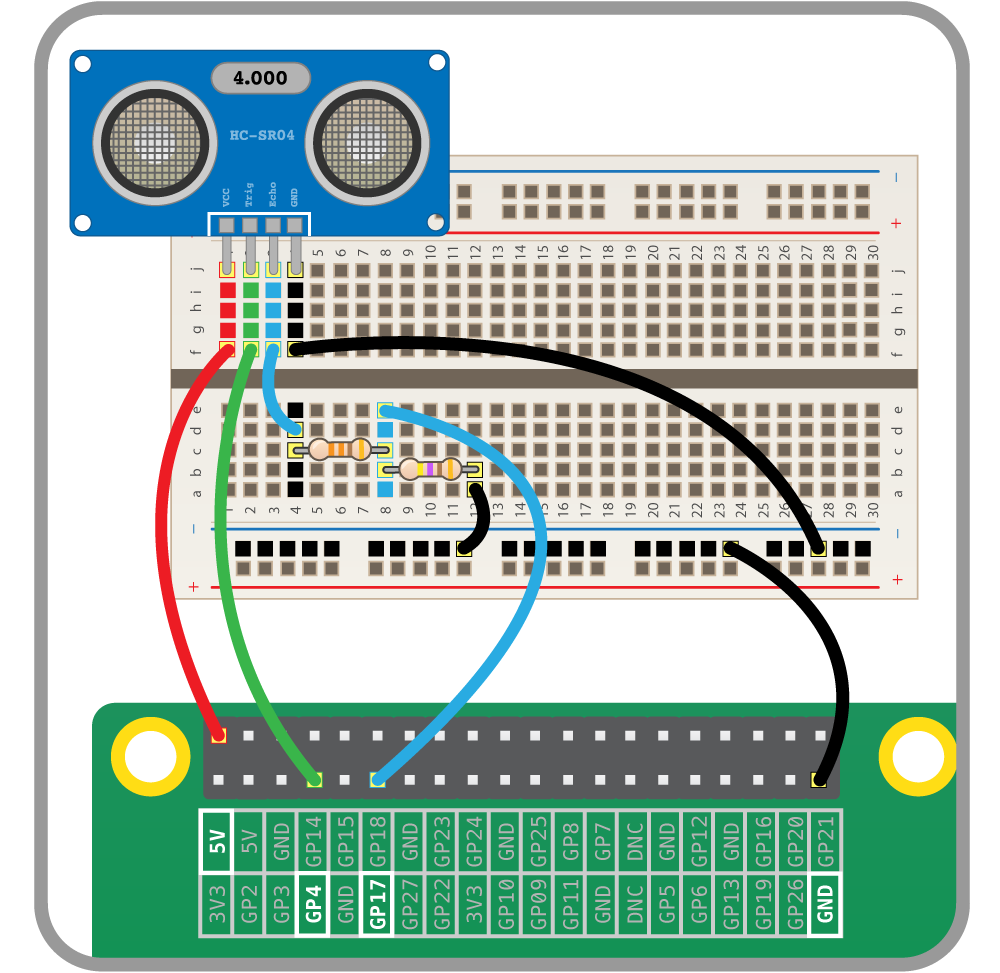
I used 1KΩ and 2KΩ resistors instead of 330Ω and 470Ω (because it's what I had on hand). Here's what that looked like:
Test the wiring with this simple Python script:
from gpiozero import DistanceSensor
from time import sleep
ultrasonic = DistanceSensor(echo=17, trigger=4, max_distance=4)
while True:
print(f"{ultrasonic.distance * 100:.1f} cm")
sleep(1)
Then install WiringPi , the fastest RPi GPIO access library:
git clone https://github.com/WiringPi/WiringPi.git
cd WiringPi
./build debian
mv debian-template/wiringpi_3.10_arm64.deb .
sudo apt install ./wiringpi_3.10_arm64.deb
Create a file with this program:
#include <wiringPi.h>
#include <iostream>
#include <iomanip>
#include <unistd.h>
#define TRIGGER_PIN 4 // GPIO 4
#define ECHO_PIN 17 // GPIO 17
#define TIMEOUT 25000 // Maximum time to wait for echo (in microseconds)
double measureDistance() {
// Send trigger pulse
digitalWrite(TRIGGER_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
// Wait for echo start
while (digitalRead(ECHO_PIN) == LOW);
long startTime = micros();
// Wait for echo end
while (digitalRead(ECHO_PIN) == HIGH && micros() - startTime < TIMEOUT);
long endTime = micros();
// Calculate distance
double duration = (endTime - startTime);
double distance = (duration * 0.0343) / 2; // Speed of sound = 343 m/s
return distance;
}
int main() {
// Initialize WiringPi
if (wiringPiSetupGpio() == -1) {
std::cerr << "Failed to initialize WiringPi" << std::endl;
return 1;
}
// Setup pins
pinMode(TRIGGER_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
while (true) {
double distance = measureDistance();
std::cout << std::fixed << std::setprecision(1)
<< distance << " cm" << std::endl;
sleep(1);
}
return 0;
}
Compile it (linking wiringPi):
g++ -o ultrasonic main.cpp -l wiringPi
And run:
./ultrasonic
If everything worked correctly, you should see something like this:
66.7 cm
66.2 cm
65.8 cm
4.8 cm
24.4 cm
23.6 cm
4.9 cm
All code available on GitHub.
12.3.2024